Battle of the Rockets
Overview
This post contains the projects I completed while competing in the Mars Rover event at the Battle of the Rockets competition. I first worked on the design of the rover parachute release system and then moved on to help with the soil collection unit. The following year, I was the captain of the rover subteam and worked on integrating all of the systems.

Details
Since I was advised to stop working on the hybrid rocket project, I joined Chantilly Aerospace Club and began participating in the Battle of the Rockets competition. Specifically, our team competed in the Mars Rover event. This event required teams to build a rocket and accompanying rover. The rover had to separate from the rocket in flight and land independently. The rover also had to detach its parachute system, move autonomously, take images, collect soil sample(s), and be able to be controlled from a device that could be operated with welding gloves on. Additional points were awarded for designs that did not require wheels.
In my first year, I was tasked with developing the rover parachute release system. This system was responsible for separating the rover from its parachute before it hit the ground. We wanted to release the rover before it touched down to prevent it from getting caught in the parachute once it began moving. Dropping the rover early would allow for the parachute to move away from the rover after separation, mitigating the risk of the rover getting caught. When prototyping, I based the system on the 3-ring release system used by sport and military parachute riggers. Below is an animation from Wikipedia that shows how it works:
After some prototyping in Fusion 360, I 3D printed the rings and created a prototype from spare straps I had lying around my house. Below is an image of the initial prototype:
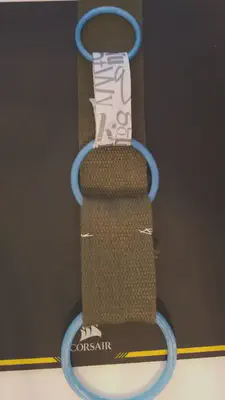
For our use case, the release was actuated by a servo located on the rover. At competition that year, the design ended up working as intended!
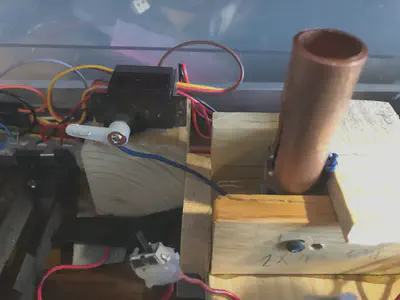
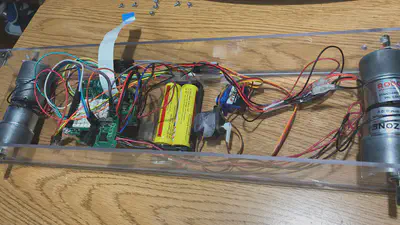
After finishing the design of the rover parachute release system, I worked briefly on the soil extraction mechanism. As an overview, our rover operated by flipping itself over and over, somewhat like TARS from Interstellar if he wasn’t able to walk bipedally. It had 4 long legs - two on either side - that raised it up and allowed it to flip over. With this in mind, our soil collection system was a copper tube that would flip out when we wanted to collect soil. When the robot fell over onto the side with the collection tube, the impact from the drop would push soil into the tube. This system essentially operated like a golf hole cutter. Below is an image of the soil collection unit and an image of the rover internals.
In my second year of doing Battle of the Rockets, I was the captain of the rover subteam. We took the previous year’s design and iterated upon it, fixing issues with the movement and camera modules. Unfortunately, due to the COVID-19 pandemic, the competition was canceled, so we were never able to validate our improvements.
Vedhas Banaji
Mechanical Engineering Major
My research interests include medical, dental, and surgical robotics as well as applying mechanical engineering to the healthcare industry.